





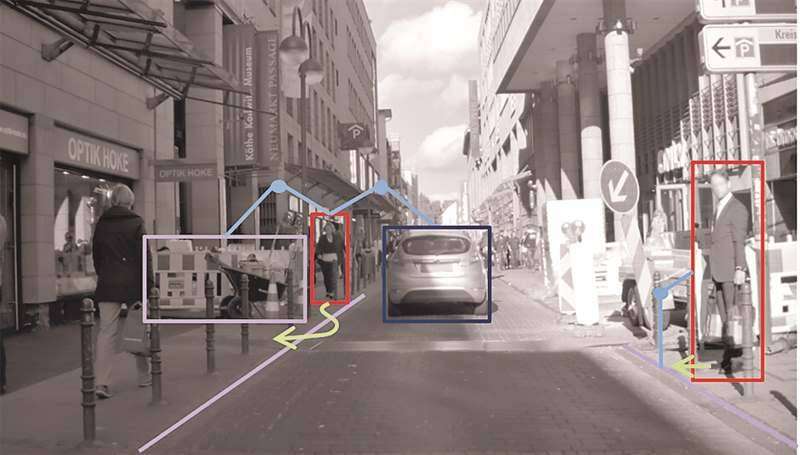
Ako sa na svet pozerajú autonómne autá? Pozrite si unikátne fotografie:







To je Elon Musk, ako ho poznáme: sotva jeho firma Tesla prekonala najväčšie produkčné problémy pri type Model 3, už je šéf útočný ako kedysi. Začiatkom novembra minulého roka pionier elektromobility v istom americkom podcaste venovanom technike napádal tradičných automobilových výrobcov, že nie sú pripravení na autonómnu jazdu. Tesla je podľa neho oveľa ďalej ako zvyšok brandže, nanajvýš dcérska spoločnosť Waymo koncernu Google je rovnocenná. Musk vymenoval aj dôvody, prečo považuje klasických automobilových výrobcov bez šancí: hoci mali iba málo vedomostí o softvéri, skomplikovali si život a používajú príliš veľa senzorov. **Skutočne, autonómna scéna v Nemecku stavia na kombináciu rozličných typov senzorov. Okrem kamier využíva zväčša šesť alebo viac radarových systémov a najmenej štyri laserové skenery.** Tesla naproti tomu využíva iba jeden radar vpredu a zvyšok zabezpečujú kamery, ktorých obrazy analyzuje výkonný počítač. Čo má podľa Muska aj svoje dôvody: oči človeka sú porovnateľné s kamerami a ak človek dokáže riadiť auto hlavne s využitím svojho zraku, musí to stačiť aj robotom.
AUTONÓMNA TAXISLUŽBA
Mercedes a Bosch majú na to iný názor. Obidvaja nemeckí výrobcovia spúšťajú v druhej polovici roka 2019 v kalifornskom meste San José taxislužbu s autonómne jazdiacimi limuzínami triedy S, **pomocou radarových senzorov a laserového skenera vytvárajúcimi obraz svojho okolia v okruhu 360 stupňov, ktorý sa vyhodnocuje paralelne k informáciám kamier.** Aké prednosti má táto náročná senzorika, je zrejmé pri pohľade na jej fungovanie: radarové senzory vysielajú rádiové vlny, ktoré sa odrážajú od pevných objektov a vracajú sa ako ozvena k senzorom. Z odrazených vĺn a z času ich letu, resp. zmenenej frekvencie, sa dá stanoviť poloha, odstup a rýchlosť iných účastníkov premávky. Čím dlhšie signál letí vzduchom, tým je objekt ďalej, zmenená frekvencia po odraze indikuje rýchlosť objektu. Laserový skener zasa vysiela svetelný signál v neviditeľnej časti spektra, ktorého odrazený obraz sa tiež analyzuje. V obidvoch prípadoch ide o aktívne senzory, ktoré sa vyskytujú aj v prírode. Napríklad netopiere vydávajú ultrazvuk, aby sa počas letu v tme vyhli prekážkam. Kamera naproti tomu vyhodnocuje obraz okolia pasívne. Neporovnáva nijaký vyslaný signál s jeho odrazom, teda „nevie“, čo ju očakáva a musí sa spoliehať na zhodu. **A to práve pri automobiloch Tesla už viackrát nefungovalo: napríklad v máji 2016 v štáte Ohio vošla do histórie prvá autonómna nehoda s následkom smrti, keď si kamery pomýlili križujúci nákladný automobil s dopravnými tabuľami nad cestou a neaktivovali brzdenie.** Že vtedy šlo o čisto asistenčný systém, ktorému vodič príliš veril, vo vnímaní verejnosti nehralo veľkú rolku. Imidžová škoda pre autonómnu scénu bola obrovská. No aj z iných príčin mnohí vývojoví pracovníci stavajú na kombináciu troch druhov senzorov. Doteraz sa vychádzalo z toho, že radarové dáta sa hodia iba na meranie odstupu a rýchlosti iných účastníkov premávky, kým úlohou kamier je rozlišovať od seba rozoznané objekty. Pre autonómne jazdiace auto je extrémne dôležité vedieť, či objekt na kraji cesty je strom alebo človek, ktorý môže kedykoľvek vstúpiť do jazdnej dráhy. Pomocou metód umelej inteligencie a Deep Learning sú počítače medzičasom tak dobre trénované, že sú schopné v reálnom čase odlišovať od seba tucty objektov: chodcov od cyklistov, autá od motocyklov alebo dopravné značky od semaforov.
LEPŠIE AKO ČLOVEK
Vyhodnocovanie obrazu je medzičasom také dobré, že dokonca aj pri chýbajúcom vodorovnom značení na ceste je schopné rozlíšiť chodník od cesty – len na základe toho, že asfalt sa pri rozdielne intenzívnom používaní trocha inak leskne. **Pretože rozoznávanie videoobrazov funguje pôsobivo dobre, vývojoví pracovníci prišli na myšlienku vyhodnotiť aj radarové informácie pomocou Deep Learning.** A pritom prekvapujúco zistili, že hoci radarový odraz vytvára iba hrubý mrak pixlov, počítač aj z neho dokáže rozoznať iných účastníkov premávky. A to má práve pri radare ešte ďalšiu veľkú výhodu: pretože jeho rádiové vlny sa odrážajú aj z priestoru medzi podlahou vozidla a cestou, sú kvázi schopné nazrieť popod auto idúce vpredu a rozoznať, či je pred ním cyklista, alebo väčšie, štvorkolesové vozidlo. Tento röntgenový pohľad pozdvihuje rozoznávanie okolia na novú úroveň. Aj laserový skener bol spočiatku podceňovaný. Kým sa inžinieri kedysi domnievali, že sa dá použiť hlavne na vytvorenie trojrozmerného obrazu okolia, medzičasom už bol tiež zapojený do klasifi kácie objektov. **Redundancia technicky rozličných zmyslových orgánov dodáva autonómnemu autu výrazne vyššiu presnosť ako iba obrazy kamier.** Ale aj obrazové dáta sa dnes vyhodnocujú inak ako ešte pred pár rokmi: pretože videokamery majú dnes rozlíšenie niekoľko miliónov pixlov a zachytávajú 20 obrazov za sekundu, boli na vyhodnocovanie potrebné veľké počítače s veľkou spotrebou energie, aby bolo možné obrazy analyzovať v reálnom čase. Preto vývojoví pracovníci združujú mnoho pixlov do osobitných celkov, čo umožňuje redukciu dát o faktor 1 000 a viac.
CIEĽ JE JASNÝ
Elonom Muskom deklarované nebezpečenstvo, že tradiční výrobcovia používajú príliš veľa senzorov, s ktorých softvérovým zvládnutím si nevedia rady, teda neexistuje. Klasickí výrobcovia a dodávatelia ako Mercedes, BMW, Audi alebo Bosch pri nových produktoch technického vývoja postupujú najprv čo najviac zoširoka, aby neskôr pri sériovej aplikácii rozhodli, kde sa dá znížiť komplexnosť a ušetriť náklady. Je zaujímavé, že aj Google ako jeden z gigantov zo Silicon Valley to robí rovnako. Aj výskumné vozidlá dcérskej spoločnosti Waymo využívajú tri druhy senzorov. Pri laserovom skenere Waymo dokonca spočiatku použilo vojenský exemplár, ktorý stojí toľko ako luxusná limuzína. Aj aktuálne testovacie vozidlá Waymo na báze vanu Chrysler Pacifica sú vybavené vyspelým 360-stupňovým laserom na streche. Už o niekoľko týždňov chce spoločnosť Waymo spustiť vo Phoenixe službu robotických taxíkov, čím predbehla Mercedes a Bosch, ktoré potrebujú na testovaciu premávku v San José čas ešte do druhého polroka 2019. **Nemeckí výrobcovia si napriek tomu nemyslia, že má Google nedostihnuteľný náskok. Jednak sa ich tímy poznajú navzájom, stretávajú sa na odborných konferenciách a približne vedia, ako je na tom konkurencia.** Okrem toho si Google vybral Phoenix ako najjednoduchšie zvládnuteľné mesto v USA, v ktorom je väčšinou dobré počasie a má zvlášť široké cesty. Expertných názorov šéfa fi rmy Tesla sa nikto nebojí, a ak áno, tak z iného dôvodu: zo strachu, že nevyzretou technikou opäť prinesie škodu autonómnej scéne.












ODPORÚČANÉ



Najnovšie príspevky







